









- Vendor: KittenBot
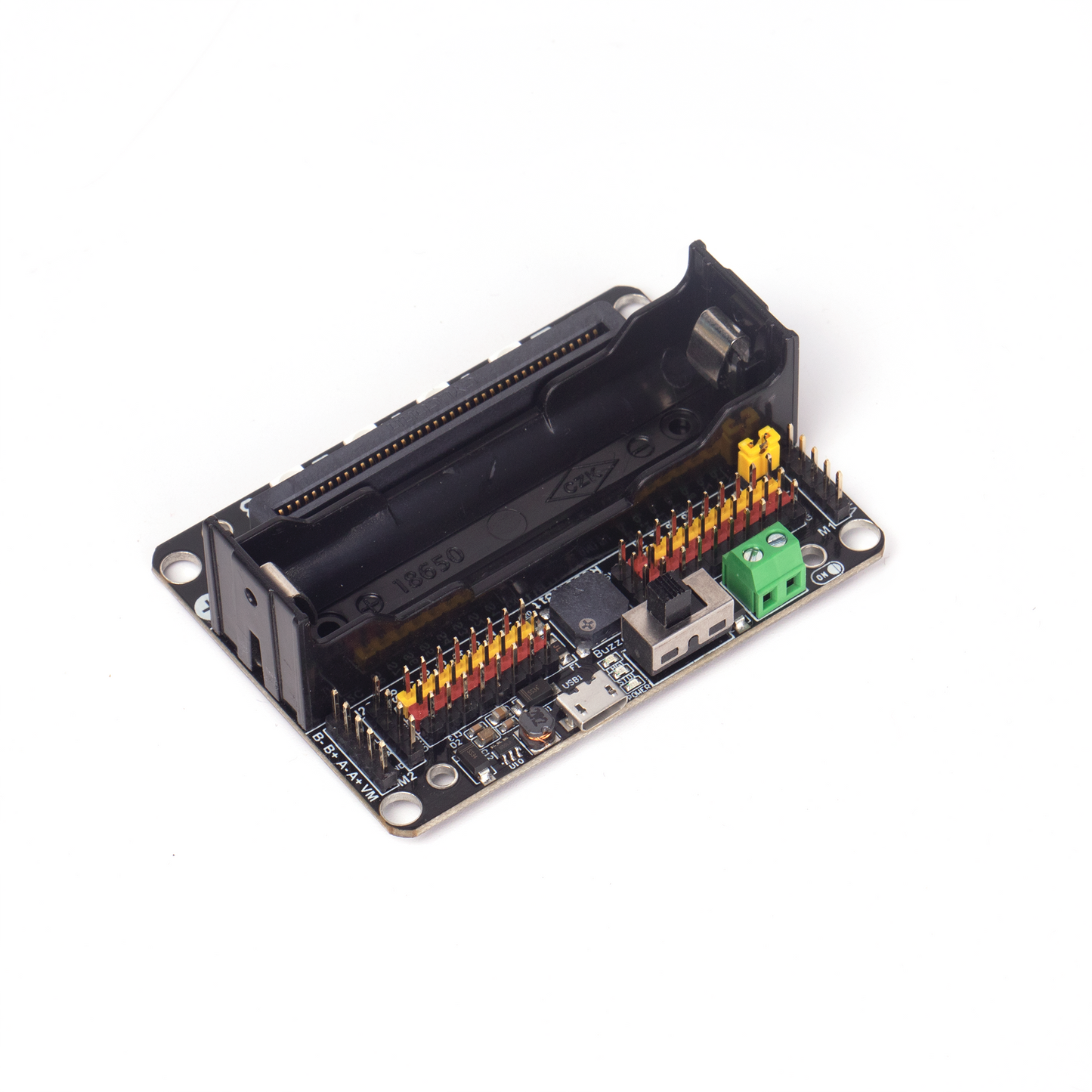
KittenBot Robotbit Robotics expansion board for micro:bit
$19.90 USD
Tax included.
Shipping calculated at checkout.
In stock!




The Robotbit is currently stocked in Amazon FBA warehouses in the U.S., enabling fast local delivery for U.S. customers.
View on Amazon: https://www.amazon.com/dp/B0BQ37H75B
Hardware Resources
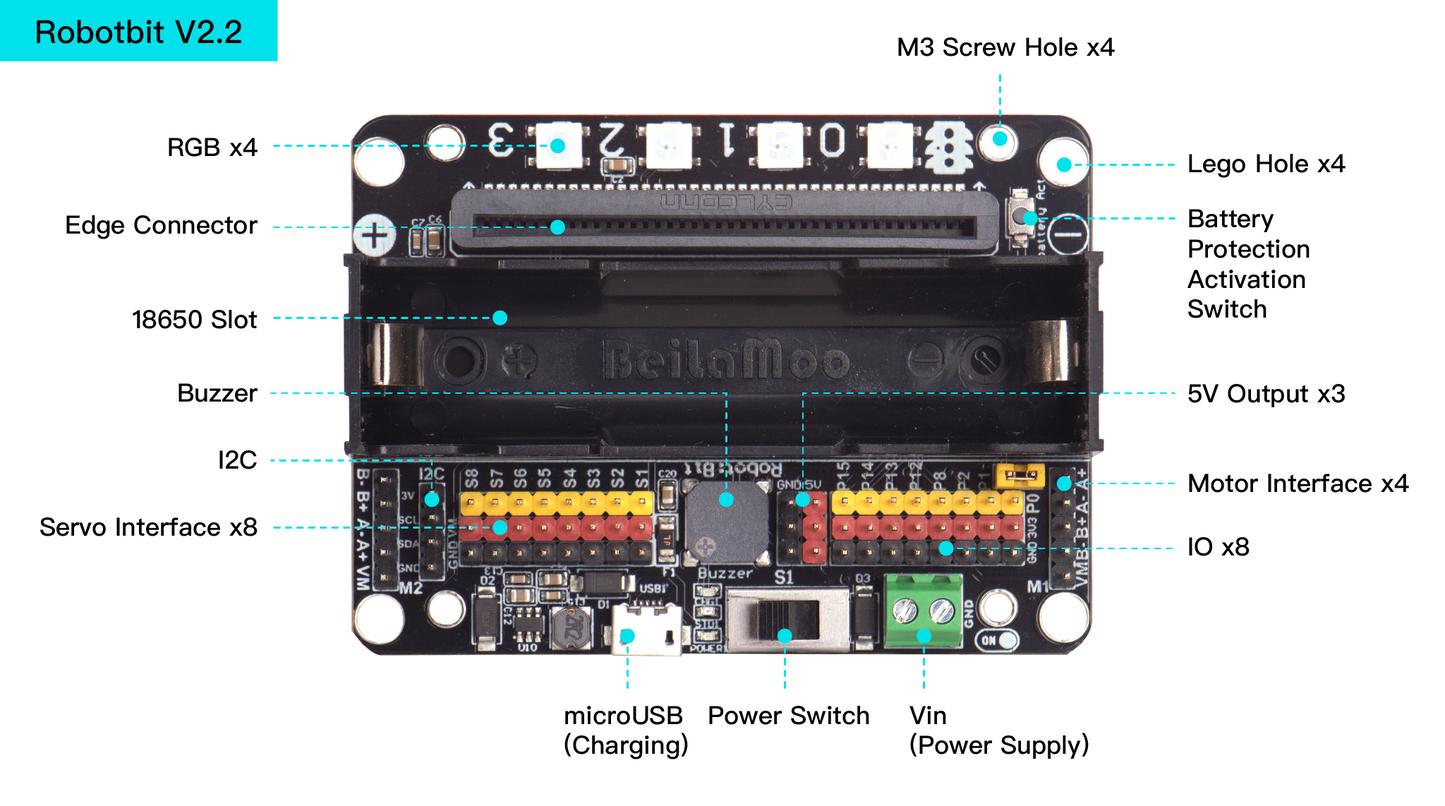
- 5V external power input(with anti-reverse protection)
- Power switch
- Power Indicator
- Battery Indicator
- Micro USB charing port
- 4-channel DC motor / 2-channel stepper motor
- Jumper for buzzer selection
- 8 channel IO(corresponding to Micro:bit P0-P2、P8、P12-P15)
- 5V and GND port
- Buzzer
- 8 channel servo port
- I2C interface (expandable I2C module)
- 18650 battery case
- Bettery protection recovery push button
- Micro:bit edge connector
- 4x RGB pixel
- Servo driver (PCA9685)
- 2xDc/Stepper driver (DRV8833)
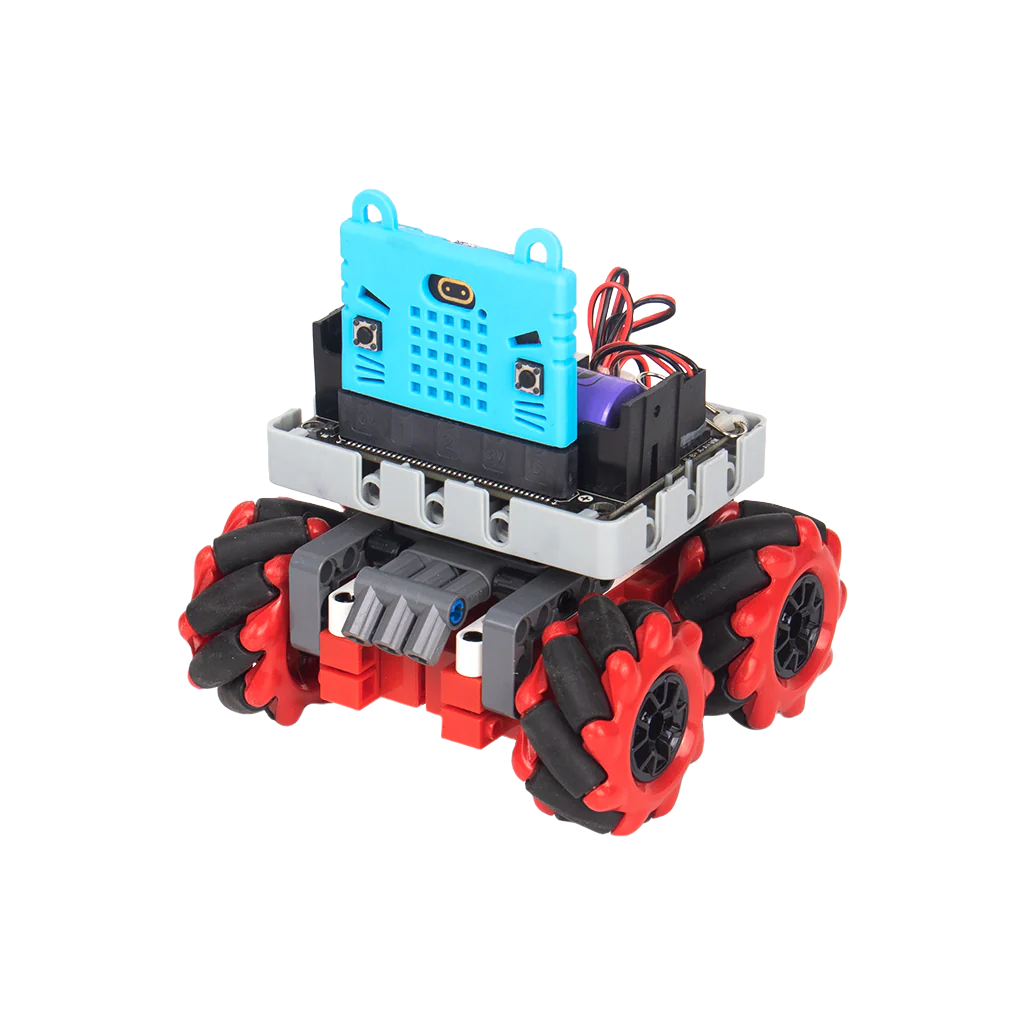
- KittenBot robot chassis mounting hole
- Standard LEGO hole
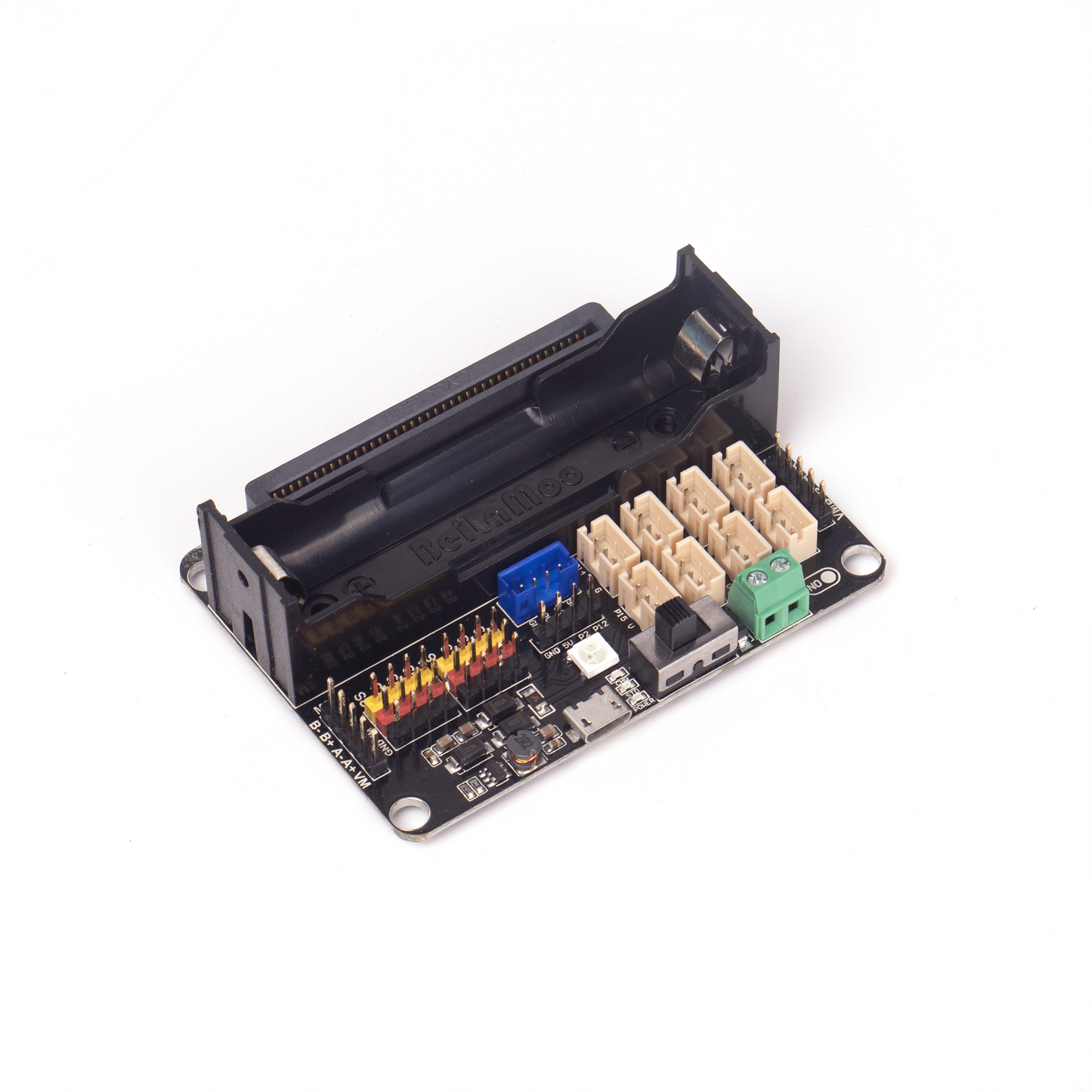
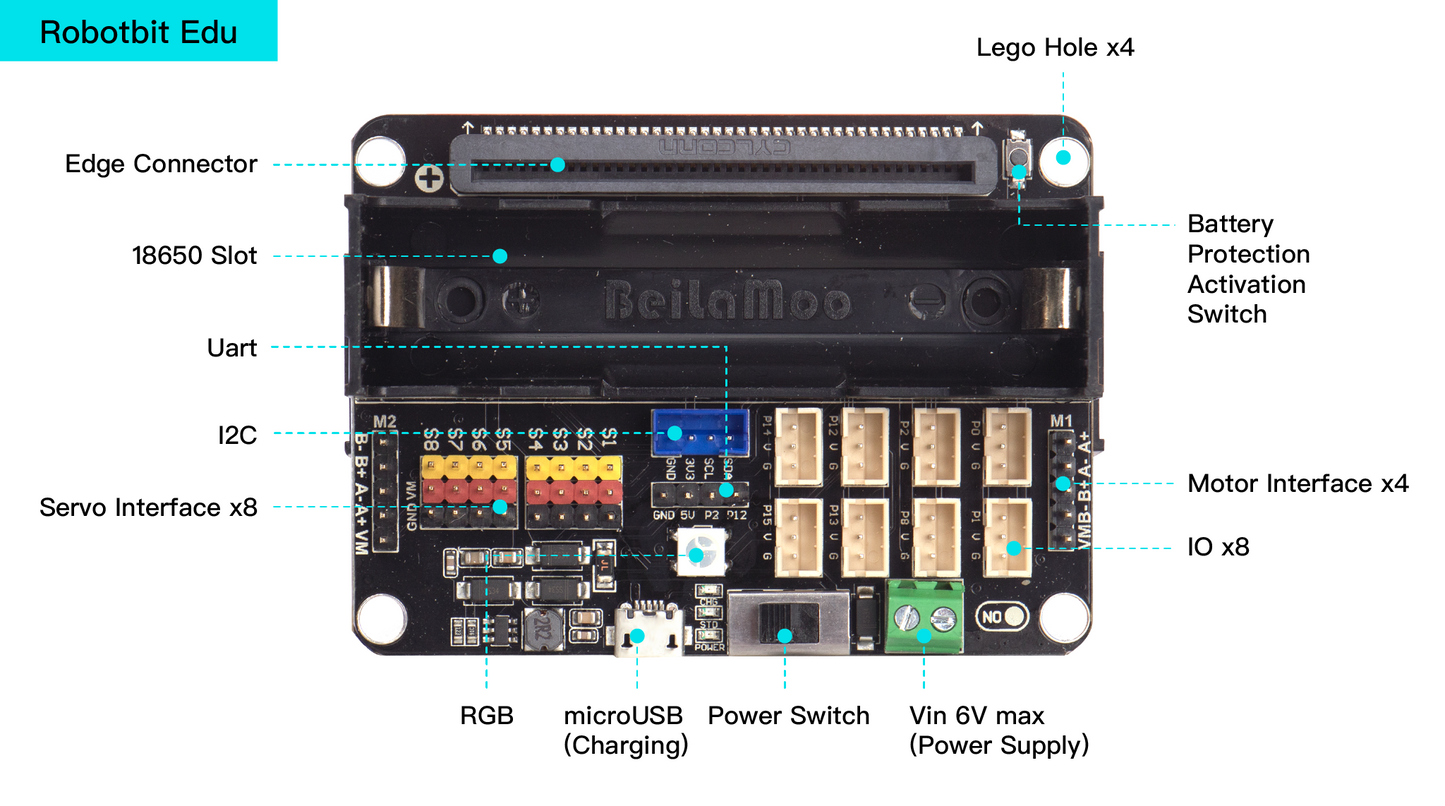
Version Comparison
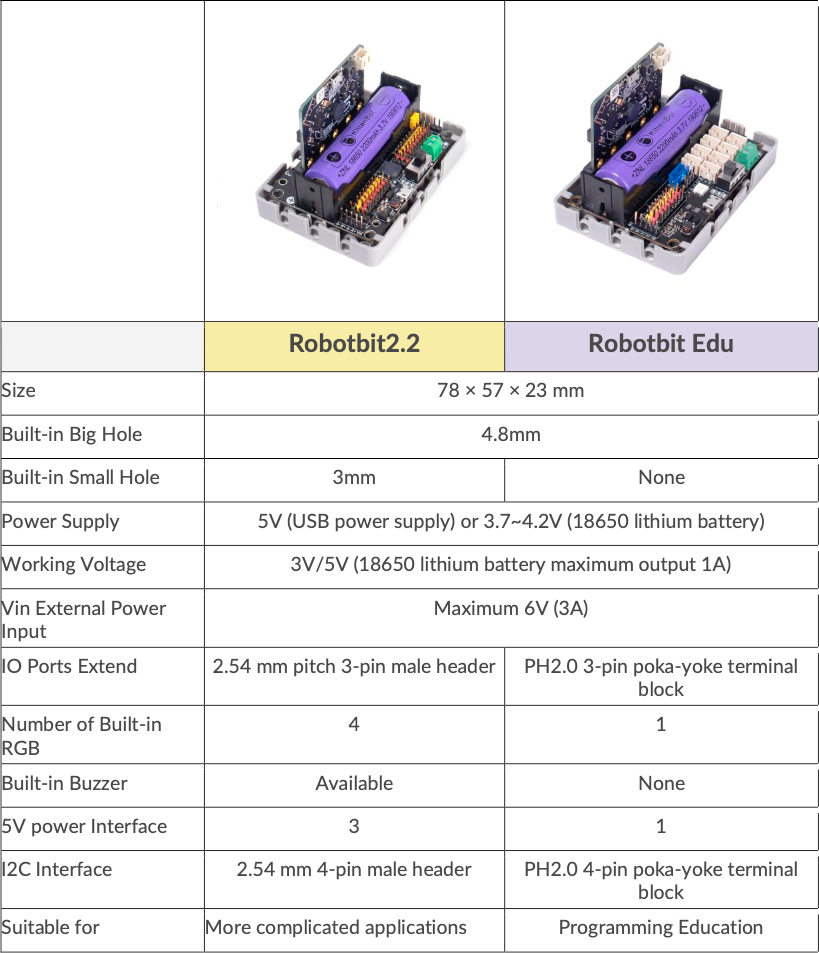
More about Robotbit Edu, go to here
Have a question?

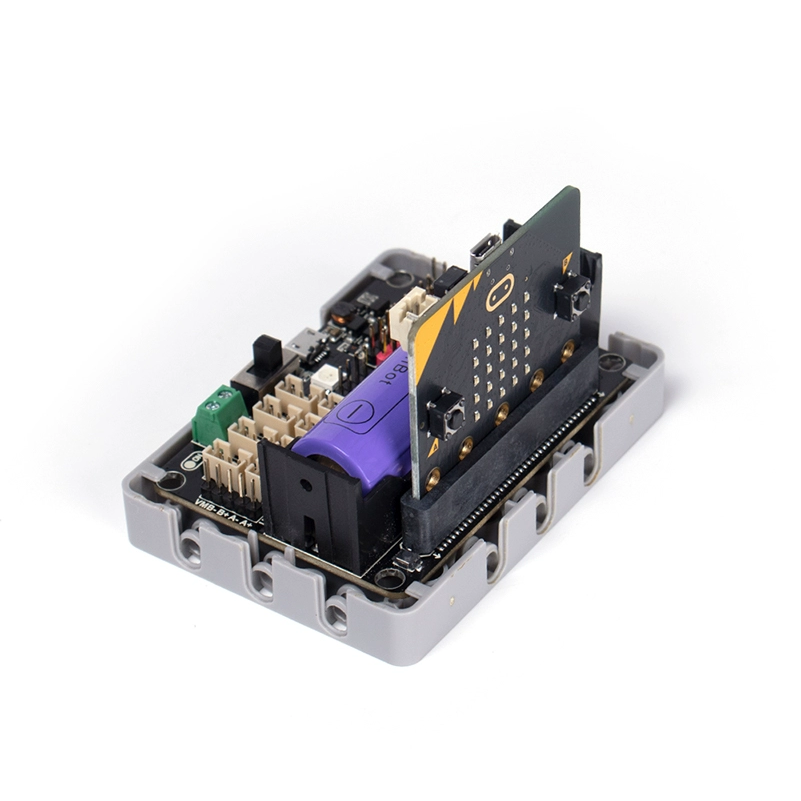
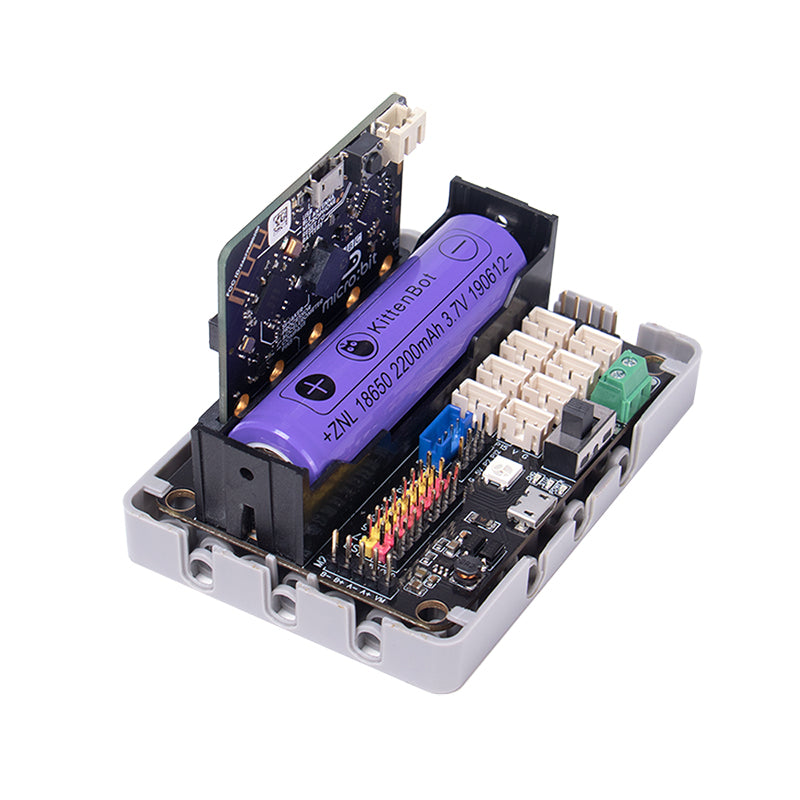
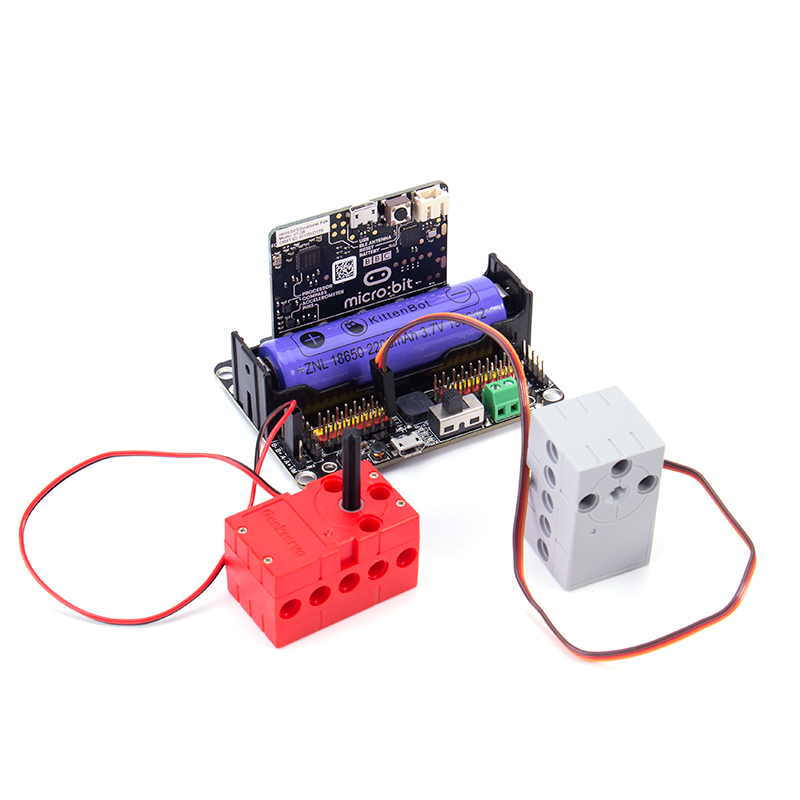
KittenBot Robotbit Robotics expansion board for micro:bit